
























Dynamische Hub-Dreh-Module von Dr. Tretter
Für Linear-, Dreh- und Positionierbewegungen
Dr. Tretter hat mit seinen Drehmomentkugelbuchsen ganz besondere Maschinenelemente im Portfolio. Auch als Nutwellenführungen bezeichnet, können sie Drehmomente übertragen und abstützen – jeweils bei gleichzeitiger Translation.

Mit den Hub-Dreh-Modulen vereint Dr. TRETTER die Eigenschaften eines Kugelgewindespindelantriebs mit einer verdrehgesicherten Drehmomentwellenführung. Konstrukteure können damit zum Beispiel in der Automatisierungstechnik noch dynamischere Anwendungen realisieren. Denn Heben und Drehen sind in der Automation häufig vorkommende Bewegungen. Meist sind für jede dieser Funktionen zwei unterschiedliche Maschinenelemente im Einsatz. Dies erfordert nicht nur mehr Platz, auch die komplette Baugruppe wird deutlich schwerer.
Vier Antriebszustände, vier Bewegungsvarianten
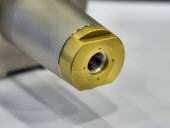
In Japan haben vor mehr als 20 Jahren findige Entwickler damit begonnen, beide Funktionen in einem Element zu vereinen. Das Ergebnis ist ein Hub-Dreh-Modul, auch als ball-screw-spline bezeichnet. Dabei handelt es sich um eine Kombination aus einem Kugelgewindetrieb und einer Drehmomentkugelbuchse: Wie beim Kugelgewindetrieb ist auf einer Hohlwelle eine Wendelnut eingeschliffen, dazu kommen mehrere Längsnuten, wie bei der Drehmomentkugelbuchse. Auf dieser Welle sind zwei drehbar gelagerte Flanschmuttern angeordnet. In der Regel treibt je ein Servomotor eine dieser Flanschmuttern an.
Konstrukteure können mit dieser Lösung vier Antriebszustände realisieren, die zu vier Bewegungsvarianten der Welle führen:
- Die Kugelgewindetriebsmutter wird angetrieben, die Drehmomentkugelbuchsenmutter steht still: Die Welle macht nur eine Hubbewegung mit einer Geschwindigkeit, die aus der Drehzahl der Kugelgewindetriebsmutter und der Gewindesteigung erfolgt.
- Beide Muttern werden gleichsinnig und mit gleicher Drehzahl angetrieben: Die Welle dreht sich mit der Mutterdrehzahl.
- Die Kugelgewindetriebsmutter steht still, die Drehmomentkugelbuchsenmutter wird angetrieben: Die Welle bewegt sich spiralförmig mit der Drehzahl der Drehmomentkugelbuchsenmutter. Die Hubgeschwindigkeit ergibt sich aus dieser Drehzahl und der Gewindesteigung.
- Beide Muttern werden mit unterschiedlicher Drehzahl gleichsinnig oder gegenläufig angetrieben: Die Welle kann eine beliebige spiralförmige Bewegung mit der Drehzahl der Drehmomentkugelbuchsenmutter ausführen. Über die Größe der Drehzahl der Kugelgewindetriebsmutter können Hubgeschwindigkeit und -richtung eingestellt werden.
Um diese Bewegungsprofile umzusetzen, ist bei den Hub-Dreh-Modulen nur eine Welle erforderlich. An dieser ist in der Regel ein weiteres Element befestigt, beispielsweise ein Greifer. Deshalb ist sie auch als Hohlwelle ausgeführt, um die Energiezuleitung einfach zu integrieren. Damit übernimmt die Welle beide Funktionen: Translation und Rotation.
Konventionelle Lösungen benötigen dagegen mindestens zwei Elemente, haben deshalb ein wesentlich größeres Bauvolumen und müssen im Regelfall größere Massen bewegen. Die Antriebe bei den Hub-Dreh-Modulen können somit im Vergleich zu anderen Lösungen zumindest theoretisch kleiner dimensioniert werden. Zudem lassen sich Bewegungsabläufe mit einer noch höheren Positioniergenauigkeit umsetzen.
Belastbar und spielfrei
Genau wie bei den Drehmomentkugelbuchsen läuft auch bei den Hub-Dreh-Modulen die Kugel in eingeschliffenen Nuten. Damit sind diese Maschinenelemente deutlich belastbarer als herkömmliche Rundführungen. Das liegt an der Geometrie der berührenden Körper. Denn die konvex geformte Kreisbogenlaufrille schmiegt sich an die ebenfalls konvexe Kugel eng an. Diese Schmiegung vergrößert die Kontaktfläche. Bei Belastung bildet sich eine Pressungsellipse aus.
Gleichzeitig reduziert sich die Hertzsche Pressung – das ist die größte Spannung, die in der Mitte der Berührungsflächen zweier elastischer Körper herrscht. Zudem sind die Hub-Dreh-Module so eingestellt, dass ihr Spiel kleiner null beträgt. Damit ist immer eine zumindest leichte Vorspannung gegeben. Auch die Stützlager der Rotationsmuttern sind leicht vorgespannt. Spielfreie Bewegungen sind so stets sichergestellt. Um die Umrechnung in Hublänge zu erleichtern, wird für den Kugelgewindetrieb eine quadratische Steigung eingesetzt. Ein weiteres Plus ist der geringe Konstruktions- und Installationsaufwand, weil das Modul lediglich ausgerichtet und montiert werden muss.
Zwei Ausführungen, zwei Bauweisen
Erhältlich sind die Hub-Dreh-Module in den zwei Typen SPBR und SPBF, die sich in ihrer Bauweise unterscheiden. Bei der Ausführung SPBR befinden sich auf der Hub-Dreh-Spindel eine Rotations-Kugelgewindemutter und eine Rotations-Drehmomentkugelbuchse. Damit eignet sie sich für einzelne oder kombinierte Positionier-, Linear- und Drehbewegungen. Vorzugsweise wird diese Ausführung für die Z-Achse von Scara-Robotern, Montage- oder Beschickungsautomaten sowie für Werkzeugwechsler in Werkzeugmaschinen eingesetzt. Erhältlich ist sie für die Wellendurchmesser 16, 20 und 25 Millimeter. Die maximale Wellenlänge beträgt beim Durchmesser 16 Millimeter 1,5 Meter, bei den anderen beiden zwei Meter.
Soll das Modul nur eine Hubbewegung ausführen, kommt anstelle der drehbar gelagerten Drehmomentkugelbuchse eine standardmäßige Flansch-Drehmomentkugelbuchse zum Einsatz. Diese Bauweise mit der Bezeichnung SPBF lässt mechanisch nur eine Hubfunktion zu, der zweite Motor entfällt. Diese Ausführung bietet sich damit besonders für lineare Positionieraufgaben unter beengten Platzverhältnissen an. Sie ist in den gleichen Größen und Längen wie die Bauweise SPBR lieferbar.
Mehr Informationen zur Dr. Tretter GmbH+Co.:
 |
Dr. Erich TRETTER GmbH + Co. |
|
Am Desenbach 10 + 12 |
|
73098 Rechberghausen |
|
Telefon: +49 7161 95334-0 |
|
Telefax: +49 7161 51096 |
|
E-Mail: info@tretter.de |
|
www.tretter.de |
War dieser Artikel für Sie hilfreich?
 |
|
|
|
|
Bitte bewerten Sie diese Seite durch Klick auf die Symbole.
Zugriffe heute: 3 - gesamt: 2313.