
























Mit MapleSim Weltraumfahrzeuge modellieren
Interaktion zwischen Rad und Boden
In dem Maß, wie die Forschung weiter in den Weltraum vordringt, nimmt die Bedeutung von Robotern bei diesen Erkundungen zu. Die derzeitige Weltraumforschung von Organisationen wie der NASA und der kanadischen Raumfahrtbehörde CSA konzentriert sich auf die Erkundung von Planeten mit Hilfe unbemannter mobiler Roboter. Es werden neue Fahrzeuge entwickelt, wie etwa der NASA-Rover „Curiosity“, um die Oberflächen des Mondes, des Mars und sogar von Asteroiden zu erforschen.
An der University of Waterloo arbeitet Willem Petersen, ein Forscher der Motion Research Group, mit John McPhee, Professor für Systementwicklung, und die CSA an der Erstellung eines präzisen Modells des Rades eines solchen Weltraumfahrzeugs, um die Interaktion zwischen dem Antrieb des Fahrzeugs und dem weichen Boden zu untersuchen.
Da bei einem Verlust der Traktion während einer Erkundung die Gefahr bestände, dass das Fahrzeug stecken bleibt und die gesamte Mission gefährdet wird, ist das Verständnis der Interaktion zwischen Rad und Boden unbedingt erforderlich, um ein effizientes und effektives Weltraumfahrzeug zu konstruieren. Das Team hat als MapleSim, ein fortschrittliches Werkzeug zur physikalischen Modellierung von Maplesoft, als wichtiges Werkzeug für diesen Entwicklungsprozess ausgewählt.
Sie haben erkannt, dass der symbolische Ansatz von MapleSim dabei hilft, sehr genaue Modelle zu erzeugen, mit denen sich die Simulationen in Echtzeit oder sogar noch schneller durchführen lassen. Dieser Ansatz erlaubt im Vergleich zu ähnlichen Modellen aus herkömmlichen Modellierungswerkzeugen die schnellsten Simulationen.
Modell des Juno Rovers
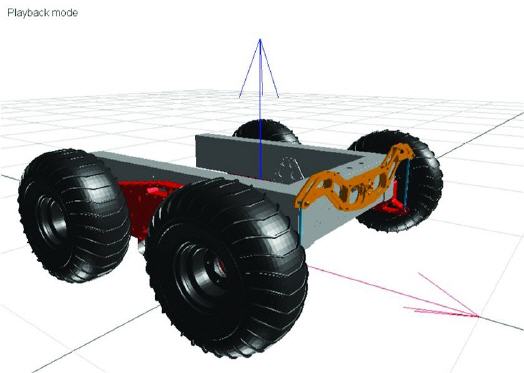
Mit MapleSim und der MapleSim Tire Library haben Petersen und Prof. McPhee ein symbolisches, dynamisches Multibodymodell des Juno Rovers der CSA erzeugt, das ein neuartiges Modell der Interaktion zwischen Rad und Boden einschließt. Das Modell des Juno Rovers legt sich direkt über die Struktur des physikalischen Systems und besteht aus einem Hauptchassis, einem Fahrwerk mit Pendelachsen und vier Reifen. Das Fahrwerk mit drei untereinander verbundenen Wippen ermöglicht es den beiden Reifen auf jeder Seite des Fahrzeugs, sich relativ zum Fahrzeug zu bewegen.
Dadurch wird die Last gleichmäßig auf die vier Räder verteilt und das Chassis bleibt auch dann in einer horizontalen Lage, wenn sich das Fahrzeug über unebenes Gelände bewegt und dabei auch große Hindernisse überwindet. Das Modell der Interaktion zwischen Rad und Boden ist mit zwei getrennten Experimenten am Juno Rover überprüft worden, indem die Ergebnisse der Simulation in MapleSim mit denen aus Versuchen an einem Prototypen verglichen worden sind.
Das erste Experiment war ein Zugversuch mit einer Deichsel, um die unbekannten Parameter des Bodens zu identifizieren, während diese Parameter im zweiten Experiment bei einem Fahrmanöver des Rovers in einem dreidimensionalen Terrain überprüft wurden. Die Forscher verglichen die Ergebnisse einer Simulation der Vorwärtsdynamik in MapleSim mit den experimentell an einem Prototypen des CSA Juno Rover ermittelten Daten und kamen zu dem Ergebnis, dass die Daten des Rad-Boden-Modells in MapleSim gut mit den experimentellen Daten übereinstimmen. Die weitere Forschung wird darauf abzielen, weitere Erkenntnisse zu den Modellparametern, deren Empfindlichkeit und ihre Auswirkungen auf die Dynamik des Fahrzeugs zu gewinnen.
All dies wird bei der Entwicklung eines allgemeineren Reifenmodells helfen. Außerdem soll das Verhalten des Modells beim Kontakt mit harten Oberflächen untersucht werden. Eine weitere Empfehlung für die künftige Forschungsarbeit ist die Implementierung der Kontaktmodelle auf Computersystemen für paralleles Rechnen, um komplexe Geometrien schneller simulieren zu können.
„Dank der ausgezeichneten Genauigkeit der Modelle in MapleSim werden bei der Entwicklung der Weltraumfahrzeuge künftig sehr viel weniger Prototypen erforderlich sein. Für die Ingenieure bedeutet dies eine erhebliche Kosteneinsparung bei kürzeren Entwicklungszeiten. Und dabei reden wir noch nicht von der Flexibilität dieser Methode“, resümiert Prof. John McPhee.
Mehr Informationen zu Maplesoft:
 |
MAPLESOFT |
|
Auf der Hüls 198 |
|
52068 Aachen |
|
Tel.: +49-241-980919-30 |
|
E-Mail: germany@maplesoft.com |
|
www.maplesoft.com |
War dieser Artikel für Sie hilfreich?
 |
|
|
|
|
Bitte bewerten Sie diese Seite durch Klick auf die Symbole.
Zugriffe heute: 1 - gesamt: 2932.