
























Sicheres Greifen von formlabilen Produkten
Sackgebinde-Greifer mit integrierten Ejektoren
Zuverlässig, flexibel, individuell anpassbar: Die FIPA GmbH hat ihr Programm um Sackgebinde-Greifer zum Handhaben formlabiler, sackartiger Gebinde und Schrumpffolienverpackungen erweitert.

Mit den FIPA-Sackgebinde-Greifern sind flexible und robuste Handlinglösungen gerade in staubintensiven Branchen kostengünstig realisierbar. Güter, wie zum Beispiel Kartons, Holz- oder Blechplatten sind handhabbar, sofern sie die Saugzelle vollständig abdecken.
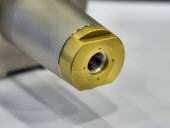
Bei den Sackgebinde-Greifern handelt es sich um eine spezielle Bauform der bewährten Flächengreifer von FIPA. Für eine optimale Saugleistung sorgen integrierte Hochleistungsejektoren. Falls bei der Handhabung extrem poröser Güter die Saugleistung der Ejektoren nicht mehr ausreicht, kann zur Vakuumerzeugung ein Seitenkanalverdichter genutzt werden.
Die Konstruktion der Sackgebinde-Greifer sorgt für eine hohe Schmutzresistenz. Der Durchmesser der Saugkanäle ist groß genug, um Staubpartikel ungehindert passieren zu lassen. Stillstände durch Verstopfung der Saugkanäle werden damit vermieden. Für eine hohe Greifsicherheit bei möglichst geringem Saugluftbedarf sorgt die Dichtmanschette, die sich optimal an die Produktoberfläche anschmiegt.
Durch den einfachen Austauschmechanismus erfolgt die Wartung schnell und kostengünstig. Im Vergleich zu Sackgreiferlösungen mit mechanischen Fingern ist der Aufwand für Justierung und Wartung geringer. Es entfällt das aufwändige Schmieren der mechanischen Greiferkomponenten. Auch die Anpassung an wechselnde Handhabungsgüter ist einfacher.
Individuelle Lösungen kostengünstig realisierbar
Da keine Greiferaufgabe der anderen gleicht, bietet FIPA eine Reihe von Möglichkeiten, den Sackgebinde-Greifer kundenindividuell anzupassen. So können die Saugkammern für Multipositionsaufgaben oder zur Anpassung an unterschiedliche Handhabungsgüter aufgesplittet werden. Bei einer Multipositionsaufgabe nimmt der an einem Roboter montierte Greifer beispielsweise zwei Verpackungen von einem Fließband auf und legt sie an unterschiedlichen Positionen ab.
Jede Saugkammer wird dabei mithilfe einer Ventilsteuerung einzeln mit Vakuum beaufschlagt. Während die eine Saugkammer die erste Verpackung noch hält, wird bei der anderen Saugkammer die Saugluft abgeschaltet und somit das Produkt abgelegt. Um den Greifer möglichst optimal an das zu handhabende Produkt anzupassen, kann die Tiefe der Saugkammer kundenindividuell ausgelegt werden. So wird sicheres Greifen bei möglichst geringem Saugluftverbrauch erzielt.
Mehr Informationen zur FIPA GmbH:
 |
FIPA GmbH |
|
Freisinger Straße 30 |
|
85737 Ismaning |
|
Tel: +49 (0)89 96 24 89 0 |
|
Fax: +49 (0)89 96 24 89 11 |
|
E-Mail: info@fipa.com |
|
www.fipa.com |
War dieser Artikel für Sie hilfreich?
 |
|
|
|
|
Bitte bewerten Sie diese Seite durch Klick auf die Symbole.
Zugriffe heute: 6 - gesamt: 6962.