
























Einstieg in die Schrittmotor-Technik
Erster Kontakt mit faszinierenden Motoren
Ob Drucker, Scanner oder Plotter, der Schrittmotor hat viele Geräte möglich gemacht, mit relativ einfacher Technik komplizierte Aktionen umzusetzen. Wer seine Funktionsweise versteht, für den öffnet sich ein großes Tor zur Welt der Automatisierungstechnik.
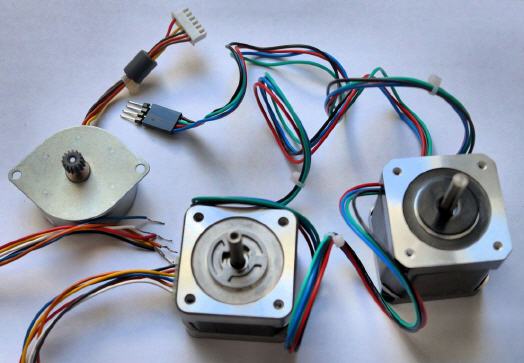
Während ein Gleichstrommotor zwei Drähte besitzt, die aus dem Gehäuse führen, sind es beim Schrittmotor gleich mehrere. Die Anzahl hängt von der Bauweise ab.
Kann ein einfacher Gleichstrommotor bereits durch das Anklemmen seiner beiden Drähte zum Laufen gebracht werden, ist dies mit einem Schrittmotor nicht möglich. Vielmehr gilt es, abwechselnd sowie in kurzen Abständen eine Spannung in einer ganz bestimmten Reihenfolge an die einzelnen Drähte anzulegen, damit sich der Schrittmotor bewegt.
Damit dies klappt, ist die Kenntnis der Verdrahtung beziehungsweise der Verschaltung des jeweiligen Schrittmotors nötig.
Bei Schrittmotoren mit sechs Anschlüssen, wie etwa dem Modell ›103-547-52500‹ von SanyoDenki, sieht diese wie folgt aus:
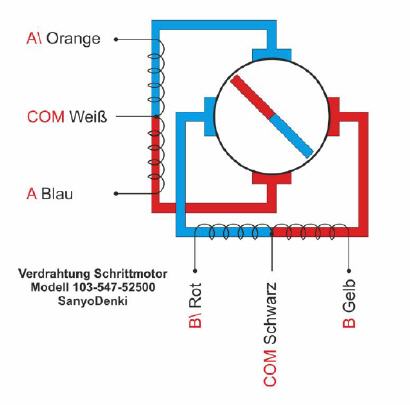
Zu beachten ist, dass es hier keine feste Zuordnung der Plus- und Minus-Polung gibt, da dies bei einem Schrittmotor ständig wechselt. Daher werden die Anschlüsse mit den Kennungen A, A\, B, B\ und COM gekennzeichnet.
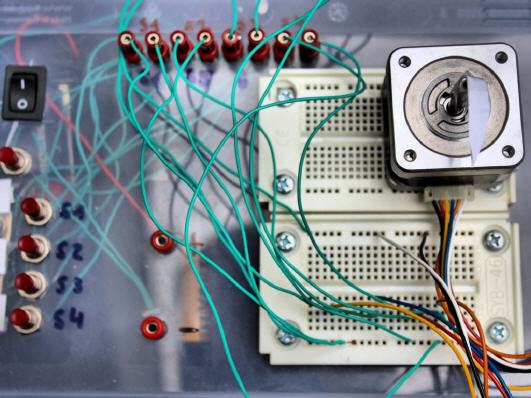
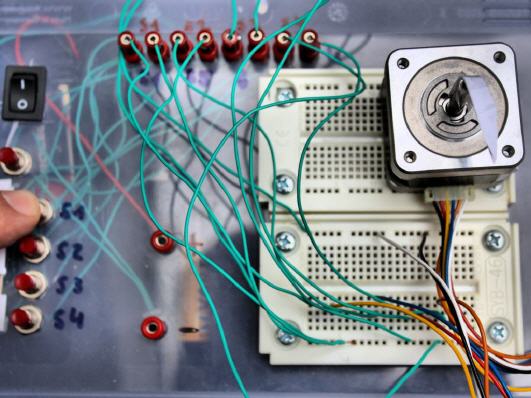
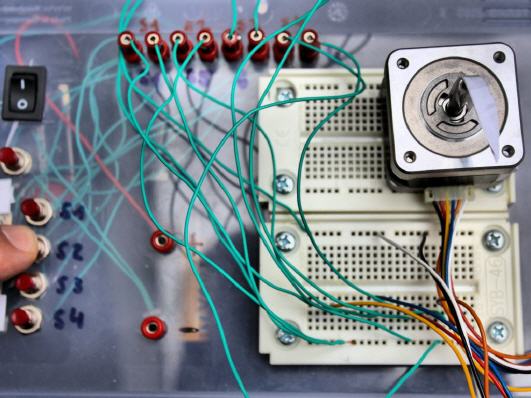
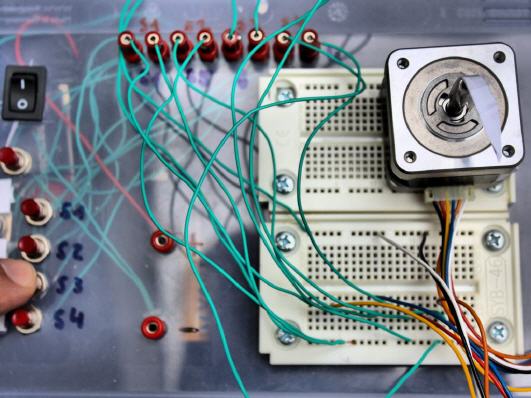
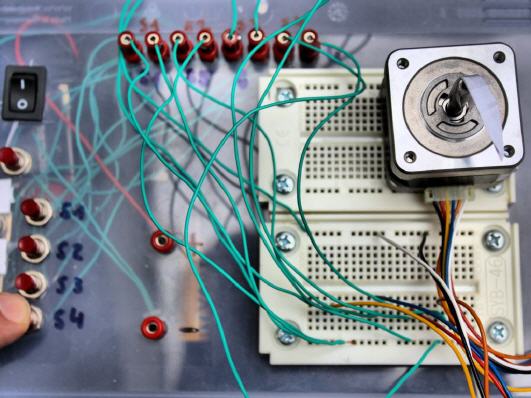
Mit Kenntnis der Verdrahtung kann problemlos mithilfe einfacher Drucktaster eine Schaltung aufgebaut werden, um den Schrittmotor zu testen.
Zu beachten ist noch, dass zwingend die korrekte Schrittfolge eingehalten werden muss, damit sich die Spindel des Schrittmotors ohne Unterlass Schritt für Schritt im Uhrzeigersinn beziehungsweise im Gegenuhrzeigersinn weiterdreht.
Für das betrachtete SanyoDenki-Modell mit sechs Anschlüssen sieht der Schaltplan im unipolaren Betrieb wie folgt aus:
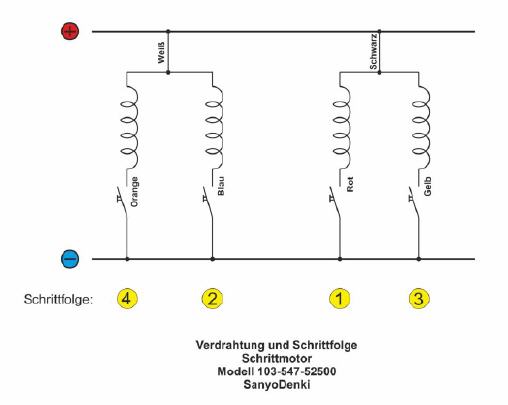
Die Schrittfolge eines Schrittmotors erinnert an die Zündfolge eines Vierzylinder-Verbrennungsmotors. Hier wie dort ist dem konstruktiven Aufbau ein wichtiges Augenmerk zu schenken, soll der jeweilige Motor problemlos funktionieren.
Wird beispielsweise die Verschaltung des Schrittmotors falsch vorgenommen, so wird dessen Spindel in einem bestimmten, kleinen Winkelbereich vor- und zurückbewegt, ohne dass eine korrekte Drehbewegung stattfindet.
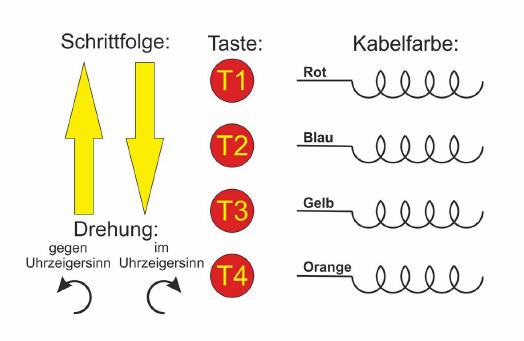
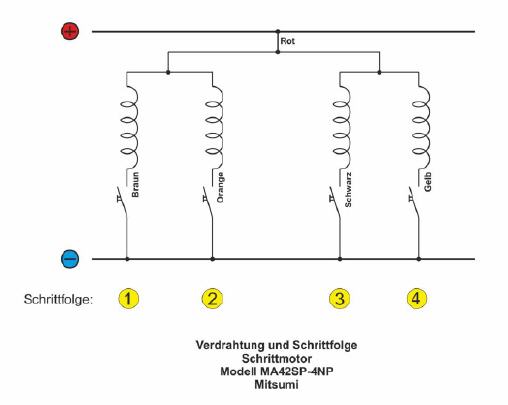
Ist geplant, mittels geordneten Durchschaltens einer Schalter-Viererkette die Spindel des Schrittmotors in Drehbewegung zu versetzen, so ist folgende Verschaltung vorzunehmen:
Wenn die Verdrahtung korrekt vorgenommen wurde, so wird sich die Spindel des Schrittmotors entsprechend bewegen.
Der Schrittmotor besitzt eine Rasterung von 1,8 Grad, somit müssen 200 Impulse erzeugt werden, damit die Spindel des Schrittmotors sich um 360 Grad weiterbewegt, demnach einmal um sich selbst dreht. Erfolgt die Umschaltung schnell genug, so geht der Motor in eine relativ gleichmäßige Drehbewegung über. Dazu bedarf es allerdings elektronischer Helfer, die in einem eigenen Kursteil vorgestellt werden.
Der Schrittmotor kann übrigens bereits mit einer 9 V-Blockbatterie betrieben werden. Allerdings ist dann das Drehmoment nicht besonders groß. Für erste Versuche in Sachen Schrittmotor ist diese Spannung jedoch vollkommen ausreichend. Für ernsthafte Anwendungen sollten jedoch mindestens 24 Volt genutzt werden. Das höchste Drehmoment besitzt der verwendete Schrittmotor bei 48 Volt.
Schrittmotor mit fünf Anschlüssen:
Das Modell M42SP-4NP von Mitsumi besitzt nur fünf Anschlüsse, wird jedoch in identischer Weise angesprochen, wie das Modell ›103-547-52500‹ von SanyoDenki. Der Unterschied ist lediglich, dass die beiden Plus-Kabel durch deren Zusammenfassung auf lediglich ein Kabel reduziert wurden. Dieses besitzt eine rote Farbe und wird – ebenso wie das weiße und schwarze Kabel beim SanyoDenki-Modell – an die Plus-Leitung angeschlossen.
Die Verschaltung des M42SP-4NP von Mitsumi sieht wie folgt aus:
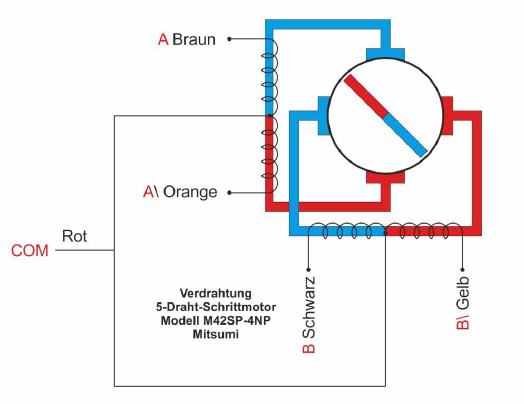
Zu beachten ist zudem, dass die Farbcodierung der Kabel nicht mit dem Sanyo Denki-Modell übereinstimmt. Die Verschaltung stellt sich demnach wie folgt dar:
Der Aufbau zeigt, dass der Schrittmotor funktioniert und in der Handhabung sich nicht von einem Sechsdraht-Modell unterscheidet.
Zu beachten ist lediglich, dass Schrittmotoren von einem Motortreiber – wie etwa dem Modell L293 DNE – angesteuert werden. Dieses Modell arbeitet als H-Brücke und schaltet in rascher Reihenfolge die Spulen durch und zwar in der Weise, dass zwischen den Anschlüssen – die in diesen Beispielen an den Minus-Pol gelegt wurden – abwechselnd eine positive sowie eine negative Spannung anliegt. Die in den vorgestellten Schaltplänen am Pluspol angeschlossenen Leitungen können demnach offenbleiben, müssen aber isoliert werden, damit diese keinen Kurzschluss auslösen können.
Schrittmotor mit vier Anschlüssen:
Schrittmotoren mit vier Anschlüssen sind ein wenig komplizierter anzusteuern. Der Grund liegt in deren Verschaltung.
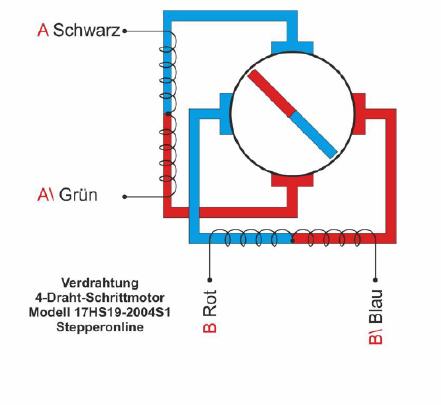
Damit sich ein Schrittmotor mit vier Drähten drehen kann, muss eine sogenannte H-Brücke zum Einsatz kommen. In diesem Fall sogar in doppelter Ausführung.
Die H-Brücke sorgt dafür, dass die beiden Spulen des Schrittmotors abwechselnd mit Strom versorgt werden. Dabei wechseln sich auch die beiden Anschlüsse jeweils hinsichtlich der Stromrichtung ab. Auf diese Weise wird ein Weiterdrehen der Welle des Schrittmotors bewirkt.
Zum Verständnis der Ansteuerung wäre es prinzipiell möglich, die H-Brücken mit mechanischen Tastern umzusetzen, doch bietet es sich an, diesen Aufbau mit Relais zu verwirklichen, zumal auf diese Weise ein durch falschen Tastendruck versehentlich ausgelöster Kurzschluss ausgeschlossen ist.
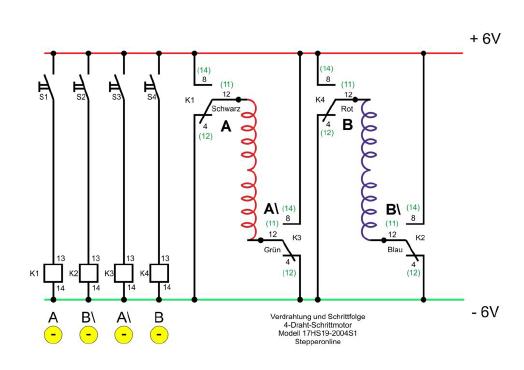
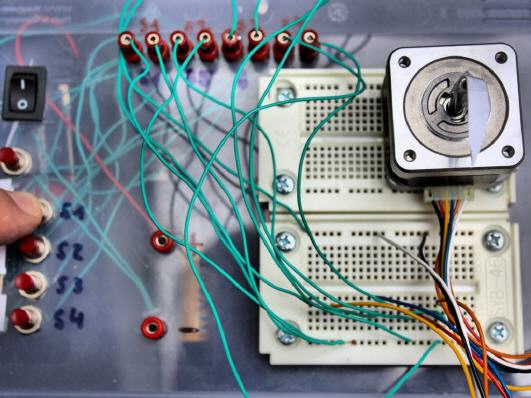
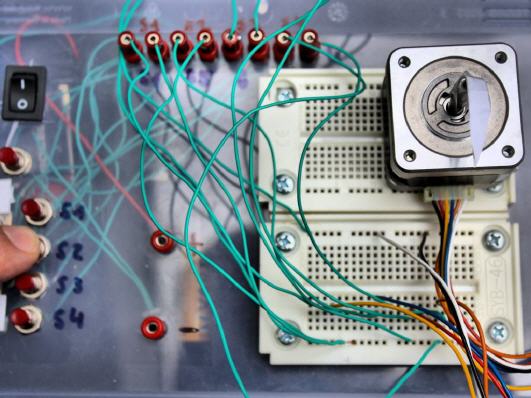
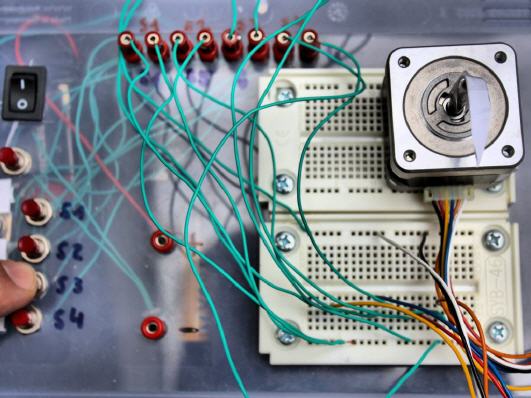
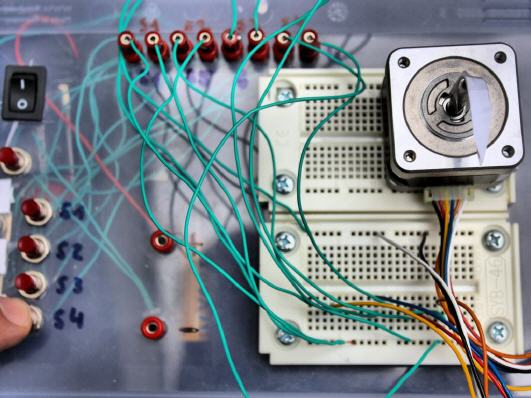
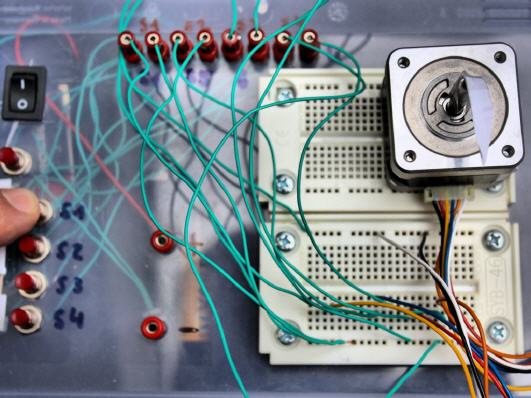
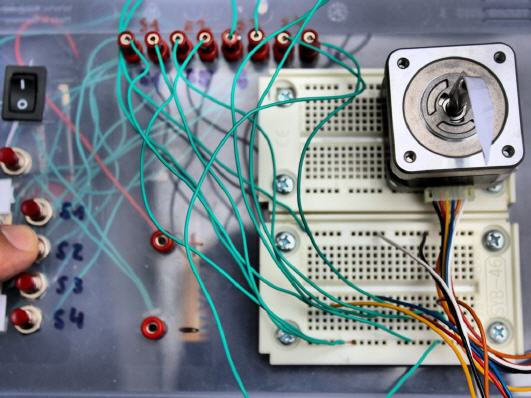
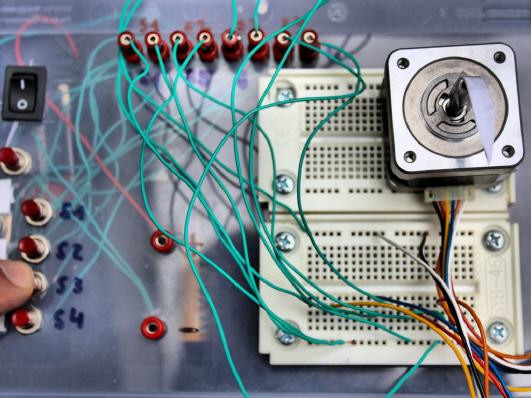
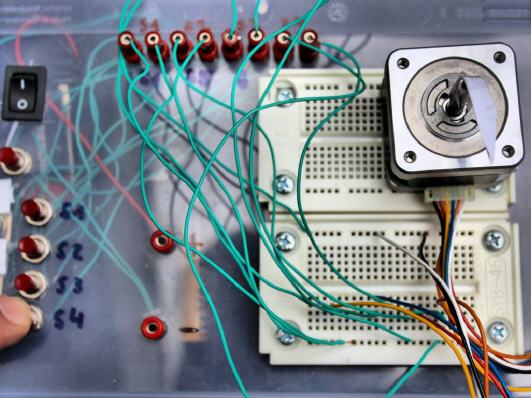
Funktionsweise:
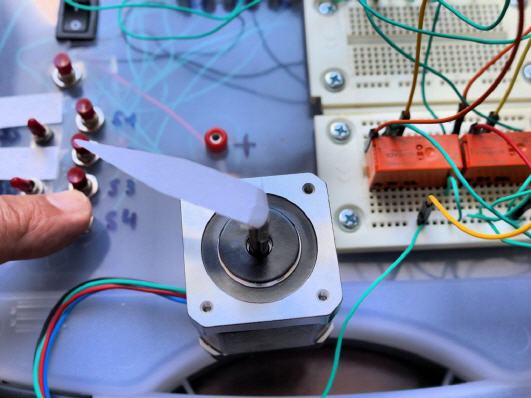
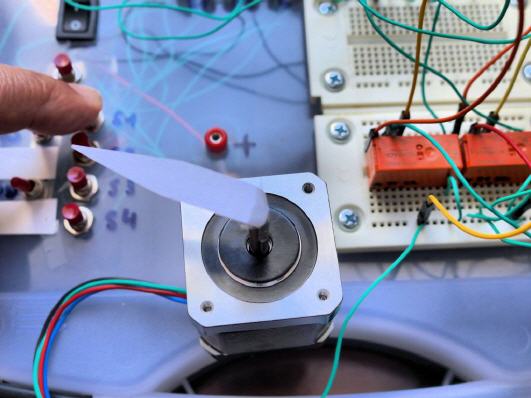
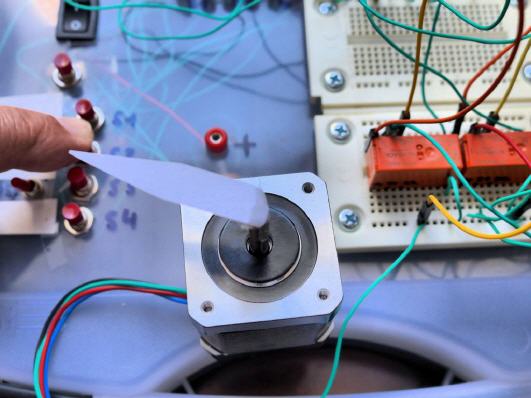
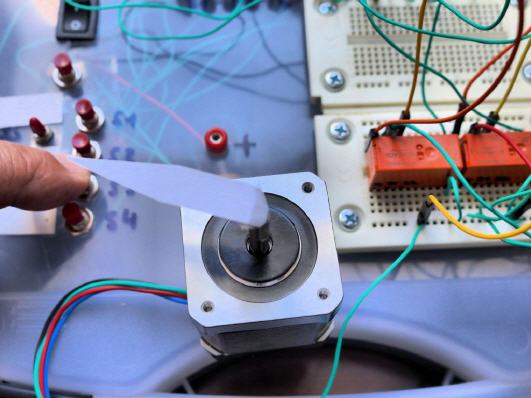
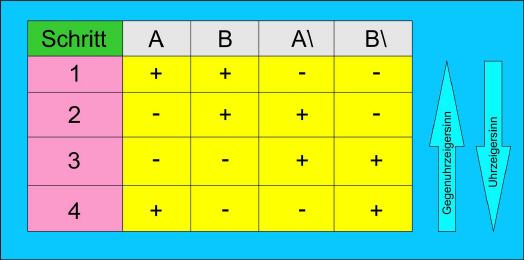
Die Welle des Schrittmotors wird im Uhrzeigersinn bewegt, wenn die Kontakte in der Reihenfolge A, B\, A\ sowie B geschlossen werden, was durch fortlaufendes Betätigen der Taster S1, S2, S3 und S4 erfolgt.
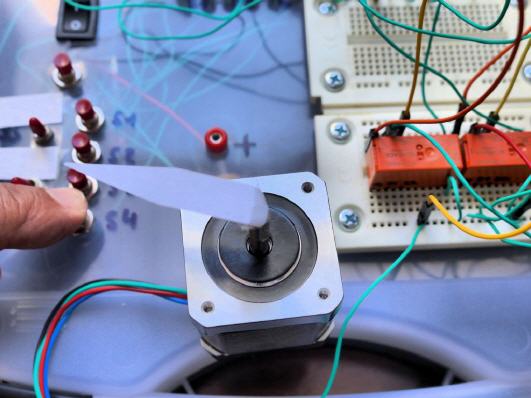
Folgende Animation zeigt die Funktionsweise:
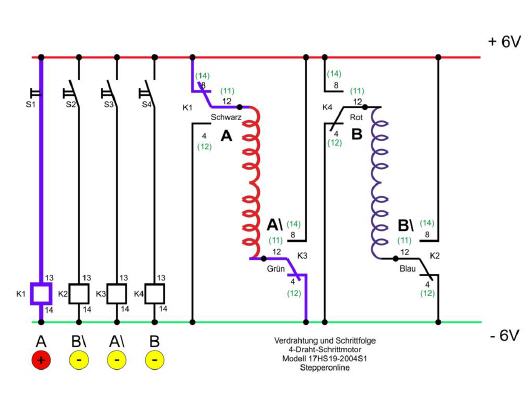
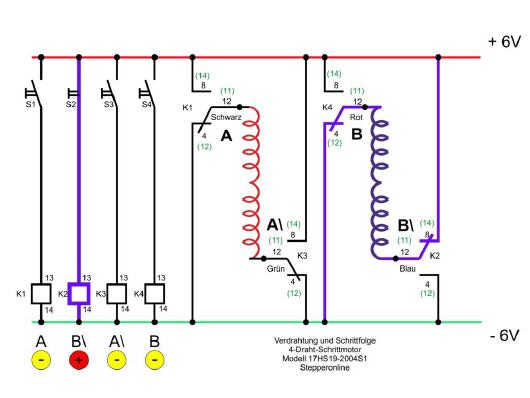
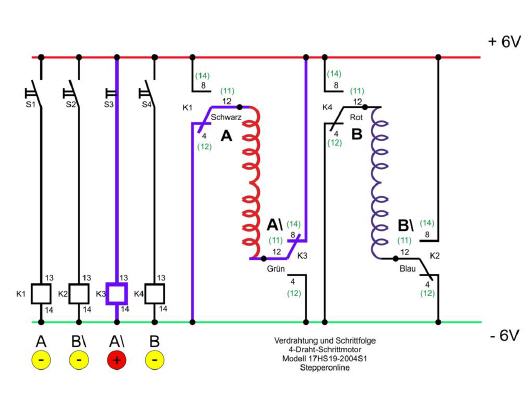
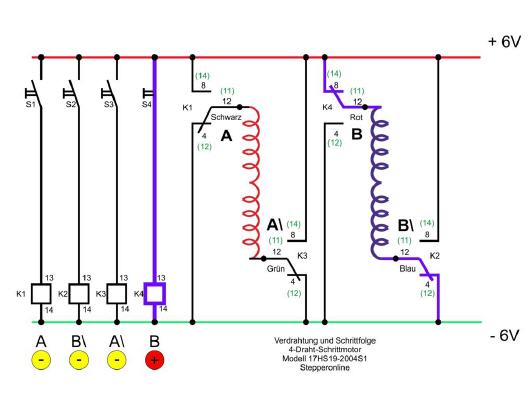
Es ist sehr schön zu sehen, in welcher Richtung der Strom sich durch die Spulen bewegt. Als Spannung wird in diesem Beispiel 6 Volt verwendet, da die verwendeten Relais nur mit dieser Spannung arbeiten.
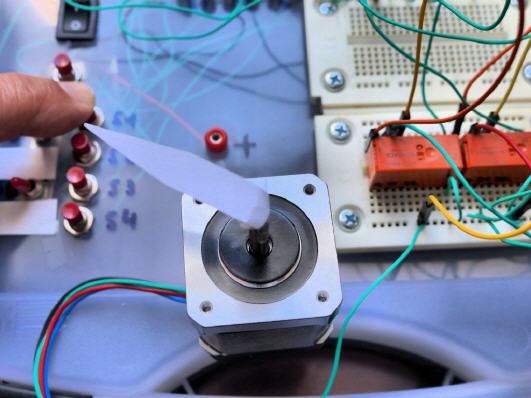
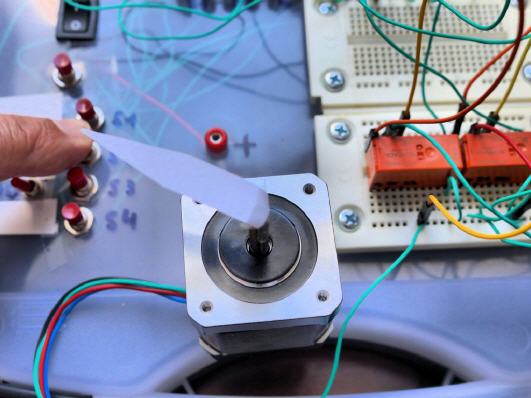
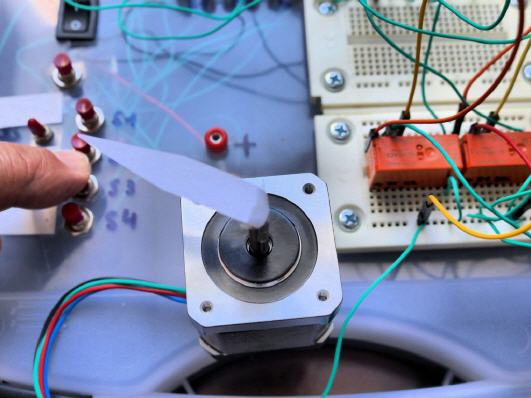
Ein auf die Schrittmotor-Welle geklebter Papierpfeil zeigt, wie sich diese nach jedem Druck auf einen Taster weiterbewegt.
In einer realen Anwendung wird diese Tätigkeit natürlich ein Schrittmotortreiber zusammen mit einem Kleincomputer – etwa dem Arduino – übernehmen. Zu beachten ist dabei, dass diese Treiber so angesteuert werden, dass stets eine Spannung an einer Spule des Schrittmotors anliegt, damit beispielsweise eine anliegende Last nicht dazu führt, dass die Welle im stromlosen Zustand von dieser Last unzulässig bewegt werden kann.
Zudem arbeitet der Motortreiber als H-Brücke und schaltet in rascher Reihenfolge den Strom zwischen den Spulen ein und aus, sodass sich eine Bewegung der Welle des Schrittmotors ergibt.
Die Beaufschlagung der Schrittmotorspulen beispielsweise des bipolaren Schrittmotors 17HS19-2004S1 mit Strom über den Motortreiber L293 DNE sieht wie folgt aus:
War dieser Artikel für Sie hilfreich?
 |
|
|
|
|
Bitte bewerten Sie diese Seite durch Klick auf die Symbole.
Zugriffe heute: 12 - gesamt: 7546.