
























Hightech-Spinne für Gefahreneinsätze
Per SLS in einem Durchgang herstellbar
Spinnen sind sehr beweglich, einige springen sogar. Diese Fähigkeit verdanken sie ihren hydraulisch betriebenen Gliedern. Forscher haben jetzt einen Laufroboter konstruiert, der den Antrieb der Spinnenbeine zum Vorbild hat. Das im 3D-Druckverfahren gefertigte Leichtgewicht erkundet für den Menschen unzugängliches Terrain.
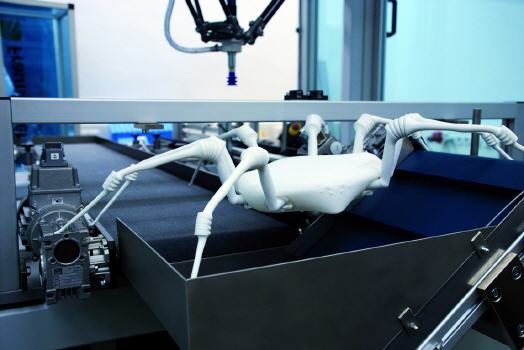
Flink und zielstrebig steuert der Laufroboter durch das nach einem Chemieunfall unbetretbare Gelände. Mulden, Furchen und andere Unebenheiten halten den achtbeinigen Hightech-Gesellen nicht auf. Seine Mission: Ausgerüstet mit Kamera und Messgeräten soll er den Einsatzkräften ein Lagebild und Daten über giftige Substanzen liefern. Keine leichte Aufgabe, schließlich darf er nicht umkippen. Doch diese Gefahr scheint gering – sicher und stabil bewegt er sich vorwärts. Wie bei einer Spinne berühren jeweils vier Beine den Boden, während die anderen vier sich nach vorne in die nächste Ausgangsposition drehen.
Auch optisch erinnert das künstliche Gliedertier an den Achtfüßler. Kein Wunder – schließlich diente die Spinne den Forschern am Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA als Vorbild. Noch liegt der Hightech-Helfer als Prototyp vor, doch künftig soll er seinen Dienst als Erkundungswerkzeug in für Menschen nur schwer zugänglichen oder gefährlichen Umgebungen versehen. Nach Naturkatastrophen, Industrie- oder Reaktorunfällen oder bei Feuerwehreinsätzen kann er die Rettungskräfte unterstützen, indem er etwa Live-Bilder überträgt oder Gefahrenquellen wie austretendes Gas aufspürt.
Mit ihren langen Extremitäten kann sich die Spinne auf vielfältige Weise fortbewegen. Manche Exemplare sind sogar fähig zu springen. Dies gelingt ihnen durch hydraulisch betriebene Faltenbälge, die als Gelenke dienen und für die Beweglichkeit der Glieder sorgen. Da den Tieren Muskeln für das Strecken der Beine fehlen, bauen sie im Körper hohen Druck auf, mit dem sie Flüssigkeit in die Gliedmaßen pumpen. Schießt die Flüssigkeit in die Beine, werden sie gestreckt. »Wir haben uns dieses Fortbewegungsprinzip zunutze gemacht und auf unseren bionischen, per Computer gesteuerten Leichtbauroboter angewandt. Seine acht Beine und der Körper sind ebenfalls mit elastischen Faltenbälgen ausgestattet, die pneumatisch angetrieben werden und so die künstlichen Glieder beugen und strecken«, erläutert Dipl.-Ing. Ralf Becker, Wissenschaftler am IPA in Stuttgart.
Die für den Antrieb erforderlichen Bauteile wie Steuerungseinheit, Ventile und Kompressorpumpe befinden sich im Körper, der je nach Anwendung unterschiedliche Messgeräte und Sensoren tragen kann. Scharniere ermöglichen im Zusammenspiel mit den Faltenbälgen die Vorwärts- und Drehbewegungen der Beine. Die sich diagonal gegenüberliegenden Glieder bewegen sich gleichzeitig. Durch Biegen der vorderen Beinpaare wird der Körper gezogen, durch Strecken der hinteren Extremitäten wird er geschoben.
Die Besonderheit des Hightech-Helfers: Er ist nicht nur sehr leicht, sondern vereint sowohl starre als auch elastische Formen in einem Bauteil und lässt sich mit wenigen Fertigungsschritten kostengünstig herstellen. Bislang wurden Konstruktionen wie der Laufroboter mit konventioneller Maschinenbautechnik gefertigt – ein zeitaufwändiges und teures Unterfangen. Die Forscher am IPA hingegen setzen auf generative Fertigungstechnologien, konkret auf das selektive Lasersintern (SLS) von Kunststoffen, einem 3D-Druckverfahren.
Dabei werden Schritt für Schritt dünne Schichten eines feinen Polyamidpulvers übereinander aufgetragen und mithilfe eines Laserstrahls in Form geschmolzen. So lassen sich komplexe Geometrien, innere Strukturen und Leichtbauteile herstellen – mit ähnlich optimalen Strukturen, wie man sie in der Natur beobachten kann. Die Experten am IPA können ihren Laufroboter flexibel konstruieren, also etwa die Beinmodule für eine bestimmte Belastung stufenlos auslegen.
»Per SLS können wir ein oder auch mehrere Beine in einem Durchgang herstellen, wir minimieren den Montageaufwand, sparen Material ein und reduzieren die Bauzeit. Durch die modulare Bauweise lassen sich einzelne Teile schnell austauschen. Unser Roboter lässt sich so preiswert fertigen, dass er nach einmaligem Gebrauch entsorgt werden kann – wie ein Einmal-Handschuh«, sagt Becker.
Mehr Informationen zum Fraunhofer IPA:
 |
Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA |
|
Nobelstrasse 12 |
|
70569 Stuttgart |
|
Telefon: +49 711 970-00 |
|
Telefax (Zentrale) +49 711 970-1399 |
|
www.ipa.fraunhofer.de |
War dieser Artikel für Sie hilfreich?
 |
|
|
|
|
Bitte bewerten Sie diese Seite durch Klick auf die Symbole.
Zugriffe heute: 4 - gesamt: 7161.