
























Medizinroboter aus dem Drucker
Die Tumortherapie der Zukunft
Für die Tumortherapie der Zukunft entwickeln fünf internationale Forscherteams einen Roboter. Obwohl dieser aus Dutzenden von Komponenten, Gelenken und Aktoren mit unterschiedlichen Materialeigenschaften besteht, lässt er sich mit einem 3D-Drucker in einem einzigen Prozessschritt herstellen.
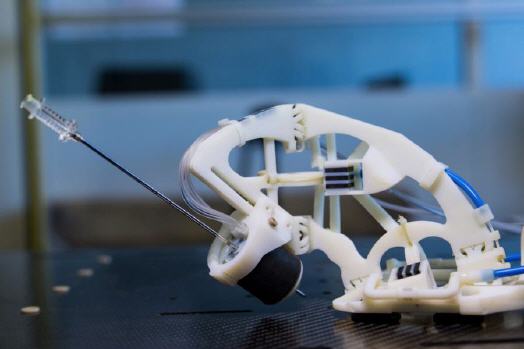
Knopfdruck genügt, den Rest erledigt der 3D-Drucker selbsttätig. Ähnlich wie bei einem Tintenstrahldrucker wird Flüssigkeit auf eine Oberfläche gesprüht. Statt unterschiedlicher Farben verwendet der PolyJet-Drucker jedoch Kunststoff: Die Düsen können zwei unterschiedliche Polymer-Lösungen einzeln oder gemischt punktgenau auftragen. UV-Licht härtet die Kunststoffe aus, bevor die nächste Lage aufgetragen wird. So entsteht Schicht für Schicht ein Medizinroboter. Wenn die Entwicklung abgeschlossen ist, soll der Roboter Ärzte bei der Entnahme von Gewebeproben und bei der Thermischen Tumorbehandlung unterstützen.
»Die Positionierung einer Nadel oder Sonde bei einem solchen minimalinvasiven Eingriff ist eine besonders schwierige Aufgabe, denn der Mediziner kann sich am besten mit Hilfe von Computertomographie- oder MRT-Bildern orientieren – und das heißt, dass er arbeiten muss, während der Patient in einer engen Röhre liegt. Da bleibt kaum Bewegungsfreiheit«, erklärt Marius Siegfarth von der Projektgruppe für Automatisierung in der Medizin und Biotechnologie (PAMB) des Fraunhofer IPA an der Medizinischen Fakultät Mannheim der Universität Heidelberg.
Der Roboter, den sein Team zusammen mit vier weiteren Forschergruppen aus Deutschland, Frankreich und der Schweiz im Projekt SPIRITS entwickelt, ist so klein und leicht, dass er zusammen mit dem Patienten in die Röhre geschoben werden kann. Steuern lässt er sich über eine Hydraulik von außen – der Arzt kann also ein paar Meter entfernt und sogar in einem anderen Raum sitzen, wo er im Falle einer CT-Aufnahme vor Strahlung geschützt ist. Die Abkürzung SPIRITS steht dabei für Smart Printed Interactive Robots for Interventional Therapy and Surgery.
»Die Herausforderung des Projekts lag darin, ein Design zu entwickeln, das sich mit einem PolyJet-Drucker in einem einzigen Schritt fertigen lässt, gleichzeitig aber aus voll funktionsfähigen Komponenten besteht – beispielsweise Drehgelenken mit Hydrau-likaktuatoren und einem Antrieb für den Nadelvorschub. All diese Komponenten haben unterschiedliche Materialeigenschaften«, erläutert Siegfarth.
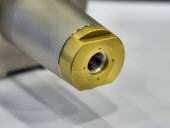
Am Institut national des sciences appliquées de Strasbourg, INSA, wo das SPIRITS-Projekt koordiniert wird, druckt der PolyJet bereits die ersten Prototypen. Diese verfügen über Hebelarme, die über Gelenke verbunden sind. Mit ihnen lässt sich eine Nadel um den Einstichpunkt in alle Raumrichtungen rotieren. Für den Antrieb sorgt ein hydraulisches System, eine Entwicklung der PAMB-Forscher: Winzige Rohre mit Durchmessern von gerade mal 4 Millimetern, Dichtungen und Kolben. Das Besondere daran: Die Kolben konnten durch die 3D-Fertigungstechnik so gestaltet werden, dass der Hydraulikdruck auf die Dichtung wirkt und deren Wirkung verstärkt.
Erste Tests zeigen, dass der Hydraulik-Antrieb aus dem 3D-Drucker funktioniert. In den nächsten Monaten werden weitere Komponenten in den Prototyp integriert: die intelligente Nadel mit Kraftsensor beispielsweise, eine Entwicklung der École polytechnique fédérale de Lausanne, EPFL. Den Vorschubmechanismus für die Nadel haben INSA-Forscher erarbeitet. Dazu kommt die »haptische Rückkoppelung«. Sie verwandelt die Messergebnisse des Kraftsensors in Widerstände, die der Arzt spürt, wenn er die Nadel durch weicheres oder härteres Gewebe führt. Erarbeitet wurde diese Rückkoppelung von Forschern der Hochschule Furtwangen. Und an der Fachhochschule Nordwestschweiz FHNW entstehen derzeit druckbare, nichtmagnetisierbare Metallkomponenten für die nächste Generation von Prototypen.

Mehr Informationen zum Fraunhofer IPA:
 |
Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA |
|
Nobelstrasse 12 |
|
70569 Stuttgart |
|
Telefon: +49 711 970-00 |
|
Telefax (Zentrale) +49 711 970-1399 |
|
www.ipa.fraunhofer.de |
War dieser Artikel für Sie hilfreich?
 |
|
|
|
|
Bitte bewerten Sie diese Seite durch Klick auf die Symbole.
Zugriffe heute: 2 - gesamt: 5865.