
























Werkstück-Spannung mit Roboter-Handling
Das Roboter-Spannmodul R-C2 von Gressel
Die innovative Lösung für die automatisierte Einzelteil- und Kleinserienfertigung vom Spanntechnik-Spezialisten Gressel AG – das patentierte Roboter-Spannmodul R-C2 – kombiniert das Belade-Handling mit der Werkstück-Spannung.
 |
 |
|
 |
||
 |
Der Referenz-Prozess gemäß VDI 2860 (zurückgezogen aber nicht ersetzt!) beschreibt sämtliche Verrichtungen, die für ein automatisiertes Werkstück-Handling inklusive aller Einzelschritte zum Spannen und Entspannen von Rohteilen, Halbfabrikaten oder fertig bearbeiteten Werkstücken – ab der Aufnahme der geordneten Aufnahme der (Roh-) Teile bis zur geordneten Ablage der fertigen Werkstücke – erforderlich sind.
In der Praxis kommen dafür zum einen Werkstück-Spanner für bestimmte Werkstück-Dimensionen, zum anderen Roboter-Greifer für bestimmte Spanner-Baugrößen, und schließlich entsprechende auf dem Maschinentisch montierte (Nullpunkt-)Spannaufnahmen bzw. am Roboter montierte Basis-Wechselgreifer eben zur Aufnahme der unterschiedlichen Greifer zum Einsatz.
Darüber hinaus sind für einen automatisierten Handhabungsprozess div. Zusatzfunktionen wie Wechseln der Backen oder automatisches Verstellen auf die jeweiligen Werkstückgrößen notwendig, und auch das automatisierte Einstellen der Spannkräfte ist zu berücksichtigen.
Überbordende Komplexität hemmt durchgängige Automatisierung
Die Komplexität der nur vermeintlich einfachen Handhabungsabläufe verlangt außerdem nicht nur nach konsequenter Erfassung und Überwachung aller Einzelschritte, sondern es sind bis dato auch mehrere Werkstück-Spanner sowie mehrere Roboter-Greifer notwendig, um in der zunehmenden Einzelteil- und Kleinserienfertigung durchgängig automatisierte Prozesse realisieren zu können. Aktuell beschränken sich die Lösungen und Entwicklungen der Hersteller von Werkstück-Spanntechnik und von Roboter-Greifern auf die Funktions-Integration in Werkstückspannern und Robotergreifern.
Am Ende hat der Anwender somit zwar eine automatisierte Fertigung vor Augen, überlegt sich wegen hoher Investitionen in die Basistechnik sowie in viele Spanner und Greifer jedoch sehr genau, wie weit Digitalisierungs- Trends rund um mechanisch angetriebene Werkstück-Spannung und robotergestütztes Werkstück-Handling wirklich praktikabel sind und vor allem auch wirtschaftlich Sinn machen. Die Gressel AG, ein Schweizer Spezialist für Werkstück-Spanntechnik und Fertigungs-Automatisierung, hat sich folgerichtig dieser drängenden Problematik angenommen und in einem Entwicklungsprojekt „Roboter-Spannmodul“ sämtliche Einzel-Funktionen analysiert.
Viele Werkstückspanner und div. Robotergreifer vs. Roboter-Spannmodul R-C2
Das Grundproblem lautet: Vom Rohteil über das Halbfabrikat bis zum Fertigteil ändert sich die jeweilige Werkstück-Kontur! Allein für das Rohteil-/Werkstück-Handling sind bis zu vier verschiedene Greifer-/Fingerkonturen erforderlich: Rohteilgreifer, Greifer-OP 10 entladen, Greifer-OP 20 beladen, Greifer-OP 20 entladen. Als Nächstes fällt zum Wenden noch eine werkstückspezifische Ablage an. Des Weiteren werden zum Spannen Backe-OP 10 bzw. Backe-OP 20 gewechselt; und für die Ablage sind sowohl einen Rohteil/Halbfabrikat- als auch eine Fertigteil-Ablage unerlässlich.
Bei jedem einzelnen Werkstück fällt somit ein hoher Initial-/Handling- als auch Umrüstaufwand an! Mit der Entwicklung des „Roboter-Spannmodul R-C2“ ist es den Ingenieuren von Gressel gelungen, die Funktionen „Greifen und Spannen“ in einem System zu integrieren, weil das Roboter-Spannmodul einerseits „formunabhängig“ zupackt und andererseits solche teuren Komponenten wie Rohteilgreifer und Greifer für die Prozessschritte OP 10 entladen, OP 20 Beladen, OP 20 entladen sowie auch die erwähnte werkstückspezifische Ablage überflüssig macht.
Das Roboter-Spannmodul fungiert demnach als Spanner zum Fixieren und Spannen des Rohteils/Halbfabrikats/Fertigteils wie auch als „Transportmittel“ für das Werkstück-Handling ab der Rohteilaufnahme bis hin zur Ablage des Fertigteils.
Funktionsintegration reduziert Abläufe und Investitionen
Der Prozessablauf mit dem Roboter-Spannmodul R-C2 gestaltet sich wie folgt: Der Roboter bzw. das Handlingsystem für die Werkstück-Beschickung wird einmalig mit dem Roboter- Spannmodul R-C2 ausgerüstet. An dieses wird – je nach Bedarf/Werkstückfamilie – der Werkstück-Spanner für die Teiledimensionen 80 x 130 mm bzw. 125 x 300 mm angedockt. Der Roboter fährt mit dem Werkstück-Spanner zur (Rohteil-/Halbfabrikat-) Ablage in die Aufnahme-Position, fixiert und spannt das Werkstück, verfährt auf den Maschinentisch und setzt die Spanneinheit auf dem Nullpunkt-Spannsystem ab.
Nach dem Spannen erfolgt die Bearbeitung, währenddessen der Roboter außerhalb des Arbeitsbereichs in Ruhestellung verharrt. Nach der Bearbeitung holt der Roboter die Spanneinheit mit dem Halbfabrikat bzw. dem Fertigteil ab und verfährt wieder in die Ablage-Position. Die Kombination aus Greifen und Spannen sorgt dafür, dass sich die vorher unzähligen werkstückspezifischen Schnittstellen – und die dafür benötigten Greifer/Spannmittel! – auf ein Minimum von nur vier werkstückabhängigen Schnittstellen reduzieren (Ablage Rohteil im Speicher, Spannbacken-OP 10, Spannbacken-OP 20, Ablage Fertigteil im Speicher).
Das Roboter-Spannmodul bewirkt demnach eine Standardisierung von Werkzeugmaschine und Roboter, die Automatisierung läuft weitgehend unabhängig von der jeweiligen Werkstück-Geometrie, nur die Spannbacken und die Werkstückablage sind werkstück-/kundenspezifisch zu gestalten!
Investment in Automatisierung: 1 Roboter-Spannmodul und max. 2 Spanneinheiten
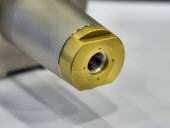
Das Roboter-Spannmodul R-C2 von Gressel ist als Leichtbausystem konzipiert, wiegt 5 kg und verfügt über eine gesteuerte Servospann-Achse (Greif- und Spannkraft bis max. 35 kN) und eine Kopplungsvorrichtung. Die Werkstück-Spannkräfte sind im Bereich von 30 bis 100 Nm frei programmierbar. Das max. Handlinggewicht beträgt 40 kg. Zur Sicherheit ist die Spanntechnik energielos geschlossen, die Überwachung der Spannung erfolgt mittels Spannweitenmessung per Lasersensor, die Spannkraftmessung durch Überwachung des Motorenstroms.
Ebenfalls überwacht wird die Funktion Ankoppeln und zum Lesen bzw. Beschreiben ist ein RFID-Sensor integriert, der das Speichern von Backen-Konfigurationen erlaubt. Schließlich sind die Pneumatik und Elektronik (Schnittstellen pta 6.2 und Profi-NET) voll integriert, sodass sich das Roboter-Spannmodul R-C2 problemlos installieren lässt. Das Roboter-Spannmodul R-C2 ist kompakt konstruiert und vermeidet Störkonturen weitgehend, womit die Funktionalität bei mehrachsiger Komplettbearbeitung voll erhalten bleibt.
Zur weiteren Reduzierung von unproduktiven Nebenzeiten kann eine weitere Spanneinheit verwendet werden, die während der Bearbeitung des auf der Maschine befindlichen Werkstücks hauptzeitparallel zu beladen und auf einer Zwischenablage zu parken ist. In Summe sind somit maximal ein Roboter-Spannmodul R-C2 und zwei anzudockende Spanneinheiten erforderlich, um die Einzelteil- und Kleinserien-Fertigung hoch produktiv und äußerst wirtschaftlich durchführen zu können.
Mehr Informationen zur Gressel AG
 |
Gressel AG |
|
Schützenstr. 25 |
|
CH-8355 Aadorf |
|
Telefon +41-52-3681616 |
|
Fax +41-52-3681617 |
|
E-Mail: info@gressel.ch |
|
www.gressel.ch |
War dieser Artikel für Sie hilfreich?
 |
|
|
|
|
Bitte bewerten Sie diese Seite durch Klick auf die Symbole.
Zugriffe heute: 4 - gesamt: 6287.